Pulse Width Modulation(PWM)secara umum adalah sebuah cara memanipulasi lebar sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata-rata yang berbeda. Beberapa contoh aplikasi PWM adalah pemodulasian data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, regulator tegangan,audio effectdan penguatan, serta aplikasi-aplikasi lainnya. Aplikasi PWM berbasis mikrokontroler biasanya berupa pengendalian kecepatan motor DC, pengendalian motor servo, pengaturan nyala terang LED dan lain sebagainya.
Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun memiliki lebar pulsa yang bervariasi. Lebar Pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Artinya, Sinyal PWM memiliki frekuensi gelombang yang tetap namunduty cyclebervariasi (antara 0% hingga 100%).
Gambar.1. Sinyal PWM dan rumus perhitungannya
Pulse Width Modulation(PWM)merupakan salah satu teknik untuk mendapatkan signal analog dari sebuah piranti digital. Sebenarnya Sinyal PWM dapat dibangkitkan dengan banyak cara, dapat menggunakan metode analog dengan menggunakan rankaian op-amp atau dengan menggunakan metode digital. Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Resolusi adalah jumlah variasi perubahan nilai dalam PWM tersebut. Misalkan suatu PWM memiliki resolusi 8 bit berarti PWM ini memiliki variasi perubahan nilai sebanyak 28 = 256 variasi mulai dari 0 – 255 perubahan nilai yang mewakiliduty cycle0 – 100% dari keluaran PWM tersebut.
Gambar 2. Pulsa PWM
Dengan cara mengatur lebar pulsa “on” dan “off” dalam satu perioda gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan didapatduty cycleyang diinginkan.Duty cycledari PWM dapat dinyatakan sebagai:
Duty cycle100% berarti sinyal tegangan pengatur motor dilewatkan seluruhnya. Jika tegangan catu 100V, maka motor akan mendapat tegangan 100V. padaduty cycle50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada, begitu seterusnya.
Untuk melakukan perhitungan pengontrolan teganganoutputmotor dengan metode PWM cukup sederhana sebagaimana dapat dilihat pada ilustrasi Gambar 2. di bawah ini.
Gambar 3. Pengontrolan tegangan Pulsa PWM
Dengan menghitungduty cycleyang diberikan, akan didapat tegangan output yang dihasilkan. Sesuai dengan rumus yang telah dijelaskan pada gambar.
Average Voltage = (a/a+b)xVfull…………………………………………………………..(2)
Average voltagemerupakan tegangan output pada motor yang dikontrol oleh sinyal PWM. a adalah nilaiduty cyclesaat kondisi sinyal “on”. b adalah nilaiduty cyclesaat kondisi sinyal “off”. Vfulladalah tegangan maksimum pada motor. Dengan menggunakan rumus diatas, maka akan didapatkan tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan.
Motor dc penguat terpisah adalah merupakan salah satu dari jenis motor dc yang dapat menambah kemampuan daya dan kecepatan karena memiliki fluks medan (Ф) yang dihasilkan oleh kumparan medan, yang terletak secara terpisah dan mempunyai sumber pembangkit tersendiri berupa tegangan dc.
V = Ea + Ia Ra
Jika E = c n Ф
Maka Vt = c n Ф+ Ia Ra
n = Vt – Ia Ra
c Ф
Keterangan :
n = Kecepatan
c = Konstanta
Ra = Tahanan Jangkar
Vt = Tegangan jepit motor
Ia = Arus jangkar
Ф= Fluks magnet
Untuk kumparan jangkar yang disuplai oleh sumber yang terkontrol dari tegangan searah, maka kecepatannya dapat diatur mulai dari nol sampai harga Vt sama dengan harga tegangan maksimum. Nilai range dari Vt2 akan mengikuti karakteristik dari tegangan Vt1.
Sumber:
V.K Mehta, Rohit Mehta.Prinsiples of Electrical Machines.
Motor DC Seri didefinisikan rangkaian motor DC dimanafield windingdanarmature windingdirangkai secara seri satu sama lain. Motor DC seri dicirikan dengan kecepatan rotasi yang tidak konstan dimana saat beban yang diberikan besar, maka kecepatan rotasi motor akan kecil, namun sebaliknya bila beban yang diberikan kecil, maka kecepatan rotasi motor akan besar. Terlihat pada gambar resistansi Rae seri dengan jangkar, resistansi bisa diatur untuk mengatur kecepatan motor seri. Dimana fluksi didapatkan dari aliran arus pada kumparan seri Nsr.
Jika diasumsikan magnetic linear
Ea=Ksr Ia Wm
Sumber:
V.K Mehta, Rohit Mehta.Prinsiples of Electrical Machines.
Motor DC Shunt adalah rangkaian motor DC dimanafield windingdanarmature windingdirangkai secara pararel satu sama lain. Motor DC Shunt dicirikan memiliki kecepatan yang konstan walaupun beban yang diberikan berubah. Penggunaan motor DC Shunt antara lain pada mesin cuci, conveyor, pompa, dll. Berikut adalah gambaran rangkaian motor DC Shunt.
Dimana : T = torsi (Newton – meter)
K = konstanta (bergantung pada ukuran fisik motor)
φ = fluksi setiap kutub (Weber) a
I = arus jangkar (Ampere)
P = jumlah kutub
Z = jumlah konduktor
A = cabang paralel
Sumber:
V.K Mehta, Rohit Mehta.Prinsiples of Electrical Machines.
DC motor jarang digunakan dalam aplikasi biasa karena semua pasokan listrik perusahaan adalah arus bolak-balik (AC), maka dari itu motor DC digunakan sebagai aplikasi khusus seperti di pabrik baja, tambang dan kereta listrik. Alasan menggunakan motor DC adalah bahwa karakteristik kecepatan / torsi DC motor jauh lebih tinggi dari motor AC. Oleh karena itu, tidak mengherankan untuk dicatat bahwa untuk sistem penggerak industri, dc motor sama populernya dengan 3-fase motor induksi. Penggunaan motor tertentu tergantung pada beban mekanik itu harus digerakkan.
Prinsip kerja
Daerah kumparan medan yang yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu.
Konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus berfungsi sebagai tempat berlangsungnya proses perubahan energi dan daerah tersebut dapat dilihat pada Gambar dibawah ini :
Dari penjelasan diatas, kita tahu bahwa pada belitan armature terjadi perubahan arah arus secara periodik yang mengalir. Mekanisme pembalikan arah arus ini dapat terjadi karena adanya komponenbrushes yang melekat pada stator dan komponen commutator yang melekat pada rotor. Ketikacommutator berputar, brushes bergerak relatif terhadap commutator dari satu segmen ke segmen lainnya sehingga arah arus yang mengalir pada belitan armature berubah. Pada grafik berikut, dapat kita lihat pembalikan arus yang terjadi pada aliran dalam rotor beserta akibatnya pada rotor :
Dengan mengacu pada hukum kekekalan energi :
Proses energi listrik = energi mekanik + energi panas + energi didalam medan magnet Maka dalam medan magnet akan dihasilkan kumparan medan dengan kerapatan fluks sebesar B dengan arus adalah I serta panjang konduktor sama dengan L maka diperoleh gaya sebesar F, dengan persamaan sebagai berikut :
F = B I L……………………………………………………………………….(pers .1)
Arah dari gaya ini ditentukan oleh aturan kaidah tangan kiri, adapun kaidah tangan kiri tersebut adalah sebagai berikut :
Ibu jari sebagai arah gaya ( F ), telunjuk jari sebagai fluks ( B ), dan jari tengah sebagai arus ( I ). Bila motor dc mempunyai jari-jari dengan panjang sebesar ( r ), maka hubungan persamaan dapat diperoleh :
Tr = Fr = B I L r……………………………………………………………(pers 2.)
Saat gaya ( F ) tersebut dibandingkan, konduktor akan bergerak didalam kumparan medan magnet dan menimbulkan gaya gerak listrik yang merupakan reaksi lawan terhadap tegangan sumber.
Agar proses perubahan energi mekanik tersebut dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar dari pada tegangan gerak yang disebabkan reaksi lawan.
Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
KONTRUKSI MOTOR DC
Bagian yang diam (Stator), terdiri dari :
Body (badan) motor
Magnet
Sikat-sikat
kerangka motor
Kutub-kutub utama beserta belitannya
Bantalan-bantalan poros
Bagian yang Berputar (rotor)
Rotor jangkar dan lilitannya
Poros jangkar (armature)
Kumparan jangkar
Inti jangkar
Torsi Motor
Torsi motor didefinisikan sebagai aksi dari suatu gaya pada motor yang dapat mempengaruhi beban untuk ikut bergerak. Ketika sumber tegangan dihubungkan pada brush (sikat) motor, maka arus yang mengalir masuk ke kutub positif brush, melalui komutator dan kumparan armatur, serta keluar melalui daerah kutub negatif dari brush.
Pada saat yang bersamaan, arus juga mengalir melalui kumparan medan magnet. Penerapan kaidah tangan kanan pada konduktor armatur yang berada dibawah kutub utara (D) memperlihatkan kumparan medan magnet yang memperkuat gaya keatas agar dapat mendorong konduktor.
Ketika kumparan medan magnet berada dibawah posisi kutub selatan E, gaya akan memotong kearah kanan, kemudian menekan kebawah, sedangkan kutub utara F dan selanjutnya akan bergerak mendorong kearah kiri dibawah kutub selatan G, sehingga terbentuk suatu arah gaya yang dapat mengakibatkan konduktor armatur yang bergerak searah dengan arah jarun jam.
Dalam kondisi armatur yang berputar, dimana konduktor bergerak dibawah kutub menuju ke kondisi neutralplane, kondisi arus menjadi reverse karena komutator.
Dari proses tersebut diperoleh suatu kenyataan yang sama, bila arus yang mengalir melalui kumparan armatur dalam kondisi reverse dengan proses membalik posisi armatur.
Namun arahnya akan meninggalkan polaritas medan yang bersangkutan, maka torsi yang dibangkitkan akan bergerak kearah yang berlawanan dengan arah jarum jarum jam.
Sedangkan torsi yang dibangkitkan pada motor dc merupakan gabungan aksi dari fluks medan ( Ф ), arus armatur ( Ia ) yang menghasilkan medan magnet didaerah sekitar konduktor. Oleh karena itu diperoleh persamaan torsi ( T ) sebagai berikut :
T = k Ф Ia………………………………………………………………….(pers 2.3)7
Sumber:
V.K Mehta, Rohit Mehta. Prinsiples of Electrical Machines.
Transformator adalah suatu alat listrik yang digunakan untuk mentransformasikan daya atau energi listrik dari tegangan tinggi ke tegangan rendah atau sebaliknya, melalui suatu gandengan magnet dan berdasarkan prinsip induksi-elektromagnet. Transformator digunakan secara luas, baik dalam bidang tenaga listrik maupun elektronika. Penggunaan transformator dalam sistem tenaga memungkinkan terpilihnya tegangan yang sesuai, dan ekonomis untuk tiap tiap keperluan misalnya kebutuhan akan tegangan tinggi dalam pengiriman daya listrik jarak jauh.
Dalam bidang tenaga listrik pemakaian transformator dikelompokkan menjadi:
1. Transformator daya.
2. Transformator distribusi.
3. Transformator pengukuran (transformator arus dan transformator tegangan).
Kerja transformator yang berdasarkan induksi-elektromagnet, menghendaki adanya gandengan magnet antara rangkaian primer dan sekunder. Gandengan magnet ini berupa inti besi tempat melakukanfluksbersama.
Berdasarkan cara melilitkan kumparan pada inti, dikenal dua macam transformator, yaitu tipe inti dan tipe cangkang.
Gambar1 Tipe kumparan transformator
Keadaan Transformator Tanpa Beban
Gambar 2 Transformator Tanpa Beban
Bila kumparan primer suatu transformator dihubungkan dengan sumber tegangan V1 yang sinusoid, akan mengalirkan arus primer Io yang juga sinusoid dan dengan menganggap belitan N1 reaktif murni, Io akan tertingagal 900 dari V1 (gambar 2). Arus primer Io menimbulkan fluks (Φ) yang sefasa juga berbentuk sinusoid.
Φ = Φmaks sin ωt
Fluks yang sinusoid ini akan menghasilkan tegangan induksi e1 ( Hukum Faraday )
e 1 = – N 1 . d Φ/dt
e1 = – N1. d(Φmaks sin ωt)/dt = -N1.ω.Фmaks.cosωt (tertinggal 90º dari Ф)
harga efektifnya adalah E1 = N1.2 p ƒФmaks / Ö2 = 4.44 n1. ƒФmaks
Pada rangkaian skunder, fluks (Ф) bersama tadi menimbulkan
e1 = – N2. d Φ/dt
e1 = – N2. ω.Фmaks.cosωt
E2 = 4.44 N2. ƒФmaks
E1/E2 = N1/N2
Dengan mengabaikan rugi tahanan dan adanya fluks bocor,
E1 / E2 = V1 / V2 = N1 / N2 = a.
a = perbandingan transformasi
Dalam hal ini tegangan induksi E1 mempunyai kebesaran yang sama tetapi berlawanan arah dengan tegangan sumber V1.
Arus Penguat
Arus primer Io yang mengalir pada saat kumparan sekunder tidak dibebani disebut arus penguat. Dalam kenyataannya arus primer Io bukanlah merupakan arus induktif murni, sehingga ia terdiri atas dua komponen ( Gambar 3 )
(1) Komponen arus pemagnetan IM, yang menghasilkan fluks (Φ). Karena sifat besi yang non linear (ingat kurva B-H) , maka arus pemagnetan IM dan juga fluks (Ф) dalam kenyataannya tidak berbentuk sinusoid (Gambar 4).
(2) Komponen arus rugi tembaga Ic, menyatakan daya yang hilang akibat adanya rugi histerisis dan arus ‘eddy’. Ic sefasa dengan V1, dengan demikian hasil perkalian (Ic x V1) merupakan daya (watt) yang hilang.
Keadaan Berbeban
Apabila kumparan sekunder dihubungkan dengan beban Z1, I2 mengalir pada kumparan sekunder dimana I2 = V2/ZLdengan q2 = faktor kerja beban.
Gambar 5 Transformator dalam keadaan berbeban
Arus beban I2 ini akan menimbulkan gaya gerak magnet (ggm) N2I2 yang cenderung menentang fluks (Ф) bersama yang telah ada akibat arus pemagnetan IM. Agar fluks bersama itu tidak berubah nilainya, pada kumparan primer harus mengalir arus I’2, yang menentang fluks yang dibangkitkan oleh arus beban I2, hingga keseluruhan arus yang mengalir pada kumparan primer menjadi :
I1 = Io + I’2
Bila rugi besi diabaikan ( Ic diabaikan ) maka Io = IM
I1 = IM + I’2
Untuk menjaga agar fluks tetap tidak berubah sebesar ggm yang dihasilkan oleh arus pemagnetan IMsaja, berlaku hubungan :
N1 IM = N1 I1 – N2 I2
N1 IM = N1 ( I1 – I’2) – N2 I2
Hingga N1 I’2 = N2 I2
Karena nilai IM dianggap kecil maka :
I1 = I’2
Jadi à N1/I1=N2/I2 atau I1/I2=N2/I1
Rangkaian Pengganti
Dalam pembahasan terdahulu kita mengabaikan adanya tahanan dan fluks bocor, Analisa selanjutnya akan memperhitungkan kedua hal tersebut. Tidak seluruh fluks (Ф) yang dihasilkan
Oleh arus permagnetan IM merupakan Fluks bersama (ФM), sebagian darinya hanya mencakup kumparan primer (Φ1) atau kumparan sekunder saja (Φ2). Dalam model rangkaian (rankaian ekivalen) yang dipakai untuk menganalisis kerja suatu transformator, adanya fluks bocor . Ф1 dan Ф2 ditunjukkan sebagai reaktansi X1 dan X2. Sedang rugi tahanan ditunjukan dengan R1 dan R2. Dengan demikian ‘model’ rangkaian dapat dituliskan seperti pada gambar 6.
Gambar 6 Rangakaian pengganti transformator
Dalam rangkaian diatas dapat dibuat vektor diagramnya sebagai terlukis pada gambar 7.
Gambar 7 Vektor diagram rangkaian pengganti
Dari model rankaian diatas dapat pula diketahui hubungan penjumlahan vektor :
Persamaan terakhir mengandung pengertian bahwa apabila parameter rangkaian sekunder dinyatakan dalam harga primer, harganya perlu dikalikan dengan faktor a2 .
Sekarang model rangkaian menjadi sebagi terlihat pada gambar 8.
Gambar 8 Rangkaian pengganti dilihat dari isi primer
Untuk memudahkan analisis (perhitungan), model rangkaian tersebut dapat diubah menjadi seperti dapat dilihat pada gambar 9.
Gambar 9 Rangkaian pengganti dilihat dari sisi primer
Vektor diagram rangkaian diatas untuk beban dengan faktor kerja terbelakang (induktif) dapat dilukiskan pada gambar 10.
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Pada dasarnya energi ini digunakan untuk memutar benda benda yang ada di sekitar kita, seperti untuk memggerakkan fan/kipas , menggerakan kompresor, mengangkat bahan,dan masih banyak yang lainnya.
OVERVIEW OF MOTORS
Motor DC adalah jenis motor yang menggunakan tegangan DC (tegangan yang searah) sebagai sumber energi. Dengan memberikan tegangan yang berbeda di kedua terminal, motor akan berputar dalam satu arah, dan apabila polaritas tegangan dibalik maka arah putaran motor akan terbalik juga.
Adapun motor DC terdiri dari dua bagian utama, yaitu:
1. Stator merupakan bagian yang tetap / stasioner. Stator menghasilkan medan magnet, baik yang dihasilkan dari sebuah kumparan (magnet elektro) atau magnet permanen.
2. Rotor, yaitu bagian yang berputar. Rotor dalam bentuk coil di mana sebuah arus listrik.
Gambar : Bagian motor DC
Adapun yang dapat siperhatikan dari DC Motor ini adalah polaritas dari tegangan diterapkan pada dua terminal menentukan arah putaran motor, sedangkan perbedaan besar pada kedua tegangan terminal menentukan kecepatan motor.
2. PRINSIP KERJA DC MOTORS
Cara kerja dari Dc motor ini sangat sederhana, yaitu apabila terdapat arus yang melewati suatu konduktor, timbul medan magnet di sekitar konduktor.
sumber: wikipedia.org
Arus listrik dalam medan magnet akan memberikan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan.
Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan
Adapun Plot grafik Tegangan versus simpangan pada mesin DC ini
Pada motor DC, medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah kumparan, karena konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian
2.1 Electromotive Force (EMF) / Gaya Gerak Listrik (GGL)
EMF induksi biasanya disebut EMF Counter. EMF kembali artinya adalah EMF tersebut ditimbulkan oleh angker dinamo yang yang melawan tegangan yang diberikan pada awalnya
Pada EMF terdapat hukum LENZ yang menjelaskan bahwa “Arah arus induksi selalu berlawanan arah dengan gerakan atau perubahan yang menyebabkannya”.
Timbulnya EMF tergantung pada:
kekuatan garis fluks magnet
jumlah lilitan konduktor
sudut perpotongan fluks magnet dengan konduktor
kecepatan konduktor memotong garis fluks magnet
2.2 Beban Motor
Beban pada motor dc penting dideinisikan dalam memahami sebuah otor listrik. Beban ini mengacu kepada output tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Sampai saat ini jenis beban dikelompokkan menjadi :
Beban torque konstan yaitu beban yang permintaan keluaran energinya bergantung terhadap kecepatan operasinya , akan tetapi torquenya tidak bervariasi.
Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
Beban dengan variabel torqueyaitu beban dengan torque yang bervariasi dengan kecepatn operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
Peralatan Energi Listrik : Motor Listrik.
Beban dengan energi konstan yaitu adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
3. JENIS MOTOR DC
Adapun Motor DC dibedakan menjadi dua jenis, yaitu yang arus dan dayanya berasal dari sumber terpisah, dan motor yang memiliki sumber daya sendiri
3.1 Terpisah Excited Winding
Jika arus medan dipasok dari sumber terpisah maka disebut motor DC sumber daya terpisah/separately excited.
3.2 Motor DC sumber daya sendiri/ Self Excited,
Pada jenis motor DC sumber daya sendiri di bagi menjadi 3 tipe sebagi berikut
a. Shunt motor under load
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo.
Adapun velocity profile dari motor shunt adalah kecepatan putarnya konstan dan tidak tergantung pada beban (hingga torque tertentu setelah kecepatannya berkurang) . Menilik dari karaktrer tersebut, maka jenis ini cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin.
Jika beban mekanis tiba-tiba diterapkan pada poros, arus yang kecil tanpa beban tidak menghasilkan torsi untuk membawa beban dan motor mulai perlahan turun. Ini menyebabkan cemf berkurang, menghasilkan arus yang lebih tinggi dan torsi lebih tinggi. Saat torsi dikembangkan oleh motor adalah sama dengan torsi yang dikenakan beban mekanik, kemudian, kecepatan akan tetap konstan. Kesimpulannya dengan meningkatnya beban mekani ssecara tiba-tiba maka, arus armature akan naik dan kecepatan akan turun.
b. Series motor
Motor seri identik dalam kosntruksi untuk motor shunt kecuali untuk field. Untuk field dihubungkan secara seri dengan armature, oleh karena itu, membawa arus armature seluruhnya. Field seri ini terdiri dari beberapa putaran kawat yang mempunyai penampang cukup besar untuk membawa arus.
Pada motor yang mempunyai hubungan seri jumlah arus yang melewati angker dinamo sama besar dengan yang melewati kumparan. Jika beban naik motor berputar makin pelan. Jika kecepatan motor berkurang maka medan magnet yang terpotong juga makin kecil, sehingga terjadi penurunan EMF. kembali dan peningkatan arus catu daya pada kumparan dan angker dinamo selama ada beban. Arus lebih ini mengakibatkan peningkatan torsi yang sangat besar.
Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan dinamo . Oleh karena itu, arus medan sama dengan arus dinamo. Karakter kecepatan dari motor DC tipe seri adalah : kecepatannya dapat dibatasi hingga 5000 rpm dan motor akan semakin cepat dengan sendirinya, sehingga harus diberikan beban sehingga kecepatannya dapat konstan.
tegangan DC step itu adalah tegangan AC .
bagaimana bisa ?
karena gelombang dari tegangan DC step itu adalah seperti gelombang tegangan AC sama sama membentuk sinusoida .namun hanya bentuknya saja yang tidak sama .
berikut perbedaannya :
cara untuk membuat DC step itu sendiri adalah dengan :
Step-Up (Boost) Converter
Topologi boost bisa menghasilkan tegangan keluaran yang lebih tinggi dibanding tegangan masukannya (penaik tegangan). Skema konverter ini diperlihatkan di Gb. 6. Jika saklar MOSFET ditutup maka arus di induktor akan naik (energi tersimpan di induktor naik). Saat saklar dibuka maka arus induktor akan mengalir menuju beban melewati dioda (energi tersimpan di induktor turun). Rasio antara tegangan keluaran terhadap tegangan masukan konverter sebanding dengan rasio antara periode penyaklaran dan waktu pembukaan saklar. Ciri khas utama konverter ini adalah bisa menghasilkan arus masukan yang kontinyu.
Pada saat ini, topologi boost banyak dipakai dalam penyearah yang mempunyai faktor-daya satu seperti terlihat di Gb. 7. Pada rangkaian ini, saklar dikendalikan sedemikian rupa sehingga gelombang arus induktor mempunyai bentuk seperti bentuk gelombang sinusoidal yang disearahkan. Dengan cara ini, arus masukan penyearah akan mempunyai bentuk mendekati sinusoidal dengan faktor-daya sama dengan satu. Pengendali konverter semacam ini sekarang tersedia banyak di pasaran dalam bentuk chip.
Step-Down (Buck) Converter.
Konverter jenis buck merupakan jenis konverter yang banyak digunakan dalam industri catu-daya. Konverter ini akan mengkonversikan tegangan dc masukan menjadi tegangan dc lain yang lebih rendah (konverter penurun tegangan).
Rangkaian ini terdiri atas satu saklar aktif (MOSFET) dan satu saklar pasif (diode). Untuk tegangan kerja yang rendah, saklar pasif sering diganti dengan saklar aktif sehingga susut daya yang terjadi bisa dikurangi. Kedua saklar ini bekerja bergantian. Setiap saat hanya ada satu saklar yang menutup. Nilai rata-rata tegangan keluaran konverter sebanding dengan rasio antara waktu penutupan saklar aktif terhadap periode penyaklarannya (faktor kerja). Nilai faktor kerja bisa diubah dari nol sampai satu. Akibatnya, nilai rata-rata tegangan keluaran selalu lebih rendah dibanding tegangan masukannya.
Beberapa konverter buck bisa disusun paralel untuk menghasilkan arus keluaran yang lebih besar. Jika sinyal ON-OFF masing-masing konverter berbeda sudut satu sama lainnya sebesar 360o/N, yang mana N menyatakan jumlah konverter, maka didapat konverter dc-dc N-fasa. Konverter buck N-fasa inilah yang sekarang banyak digunakan sebagai regulator tegangan mikroprosesor generasi baru. Dengan memperbanyak jumlah fasa, ukuran tapis yang diperlukan bisa menjadi jauh lebih kecil dibanding konverter dc-dc satu-fasa. Selain digunakan sebagai regulator tegangan mikroprosesor, konverter buck multifasa juga banyak dipakai dalam indusri logam yang memerlukan arus dc sangat besar pada tegangan yang rendah.
Perlu dicatat bahwa arus masukan konverter buckc selalu bersifat tak kontinyu dan mengandung riak yang sangat besar. Akibatnya pada sisi masukan, konverter buck memerlukan tapis kapasitor yang cukup besar untuk mencegah terjadinya gangguan interferensi pada rangkaian di sekitarnya. Konverter dc-dc jenis buck biasanya dioperasikan dengan rasio antara teganan masukan terhadap keluarannya tidak lebih dari 10. Jika dioperasikan pada rasio tegangan yang lebih tinggi, saklar akan bekerja terlalu keras sehingga keandalan dan efisiensinya turun. Untuk rasio yang sangat tinggi, lebih baik kalau kita memilih versi yang dilengkapi trafo.
Pengambilan partikel koloid asap dengan tegangan tinggi dan debu dari gas buangan pabrik
Contoh alat yang menggunakan prinsip elektroforesis adalah pengendap cottrell. Alat ini digunakan untuk memisahkan partikel-partikel koloid seperti asap dan debu yang terkandung dalam gas buangan pabrik. Hal ini bertujuan untuk mengurangi zat-zat polusi udara, di samping dapat digunakan untuk memperoleh kembali debu berharga seperti debu arsenik oksida.
Mekanisme kerja alat ini adalah sebagai berikut. Gas buangan dialirkan melalui ujung-ujung logam yang tajam yang telah diberi tegangan tinggi. Ujung-ujung logam ini akan melepas elektron-elektron dengan kecepatan tinggi yang akan mengionisasi molekul-molekul di udara. Partikel-partikel koloid dalam gas buangan akan mengadsorbsi ion-ion ini sehinggan menjadi bermuatan positif. Partikel-partikel koloid selanjutnya akan tertarik ke elektrode dengan muatan berlawanan dan menggumpal.
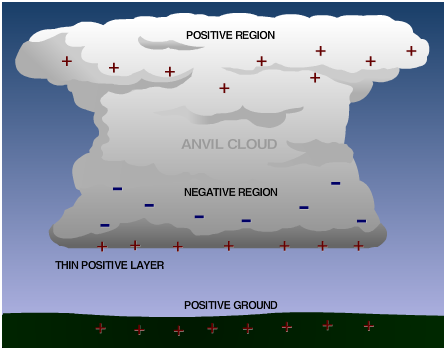
Untuk kuis take home Teknik Tegangan Tinggi, saya memiliki ide untuk membuat alat penangkal petir tanpa menggunakan arester, hanya menggunakan prinsip kerja medan dan tegangan tinggi. Pada umumnya, penangkal petir dibuat seperti tiang besi di tempat tinggi yang digroundkan. Pada ide ini, penangkal petir menggunakan alat yang dapat menghasilkan medan listrik negatif di sekitarnya agar medan listrik negatif awan tidak terjadi breakdown/tembus/petir.
Prinsip Kerja :
Alat ini dilengkapi dengan generator medan listrik negatif yang dihasilkan dari ionisasi atom udara di sekitarnya. Karena saat sebelum terjadi petir lapisan awan yang memuat muatan negatif ada di bagian bawah awan, petir akan terjadi jika ada medan positif yang cukup untuk memicu breakdown, muatan positif tersebut yang paling berpotensi adalah permukaan bumi. Alat ini dapat melindungi alat alat yang mudah rusak bila terjadi surge. Medan listrik negatif yang dihasilkan oleh alat tersebut, mencegah terjadinya petir di dareh yang tercover oleh medan listrik dari alat tersebut
 Gambar.1. Sinyal PWM dan rumus perhitungannya
Gambar.1. Sinyal PWM dan rumus perhitungannya